はじめに
身バレしそうですが(やろうと思えば全然特定できる)私、大阪の某大学に通う大学生です!次B4になりますね(早すぎて震える)。
まぁ肝心の研究室配属はこの4月なのですが、それ以外のイベント?はほぼ終わったんです。大学生を3年間やってきたわけですからね。研究室配属については、おいおいブログに書こうとは思いますが。どうなることやら。自分よりGPA高い人を如何にして攻略するかが肝ですな。あぁこわいこわい。
この話は置いておいてですね、今回は大学生になると、こんなことするよ、こんな生活だよ、という感想というか体験記というか、そういう類のことを記そうと思います。
時期的に、そろそろ合格発表とかあるのでね。そういう人の参考になれば幸いです。
私のスペック
まず、お前誰やねん、どういう状況やねんということをさらっと書きます。この前提のもと話は進みます。
- 今、B3。次B4になります。
- 大阪で一人暮らし。
- 仕送り+ 奨学金 + バイトで生計を立ててます。
- 理系です。ブログの記事からも推測できるでしょうが工学部です。
- 今はバイトしてますが、B3になるまでしてなかった。
- 友人そこそこ。多分少ない方(B1はぼっち。今でもサークル以外はぼっち。)ですが、満足してます。
- 彼女無し。彼氏無し。悔しいですが。(´;ω;`)
- 趣味は電子工作、ゲーム、アニメとか。完全にヲタク君です。ヲタクにやさしいギャルは存在しません。
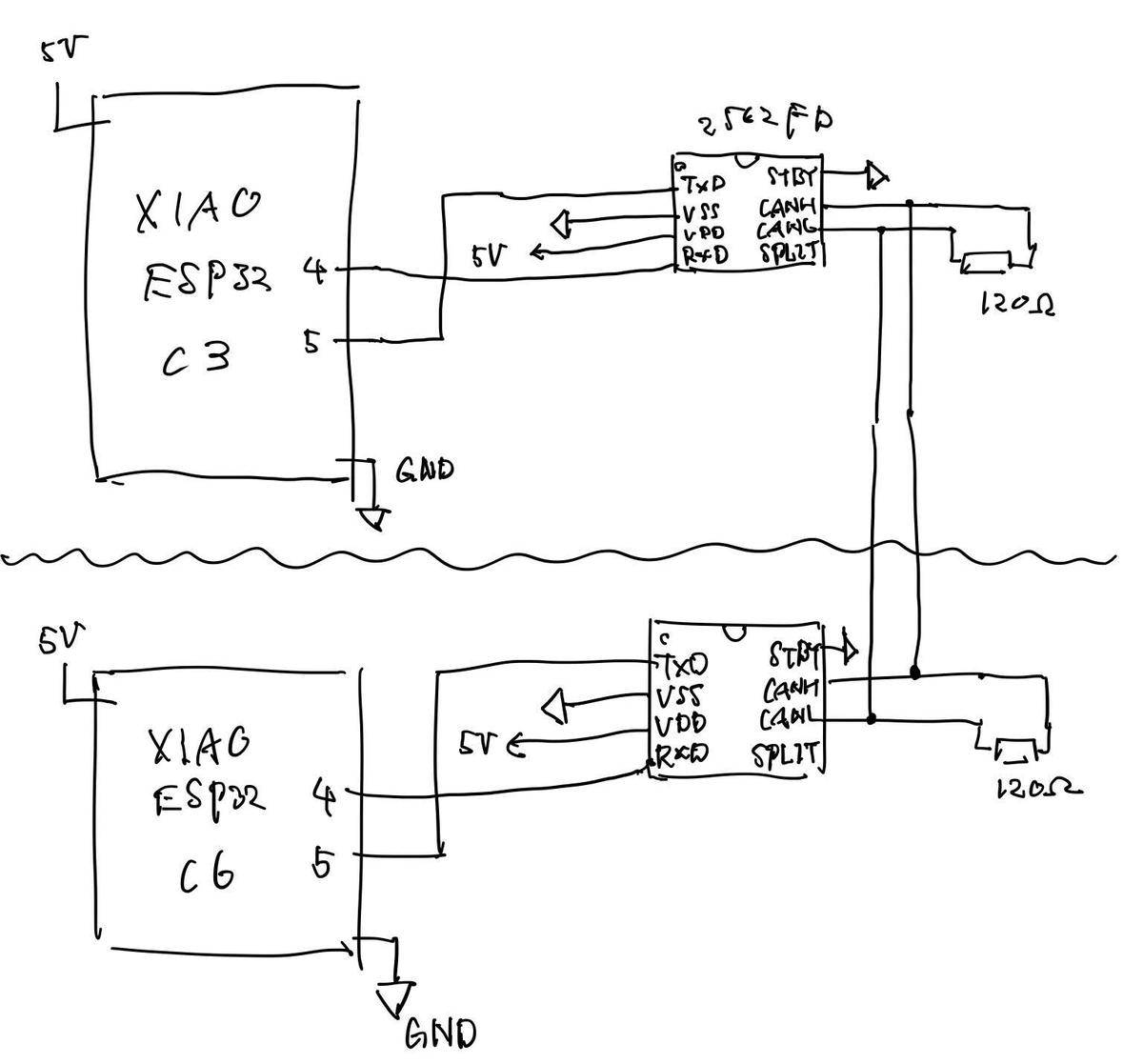
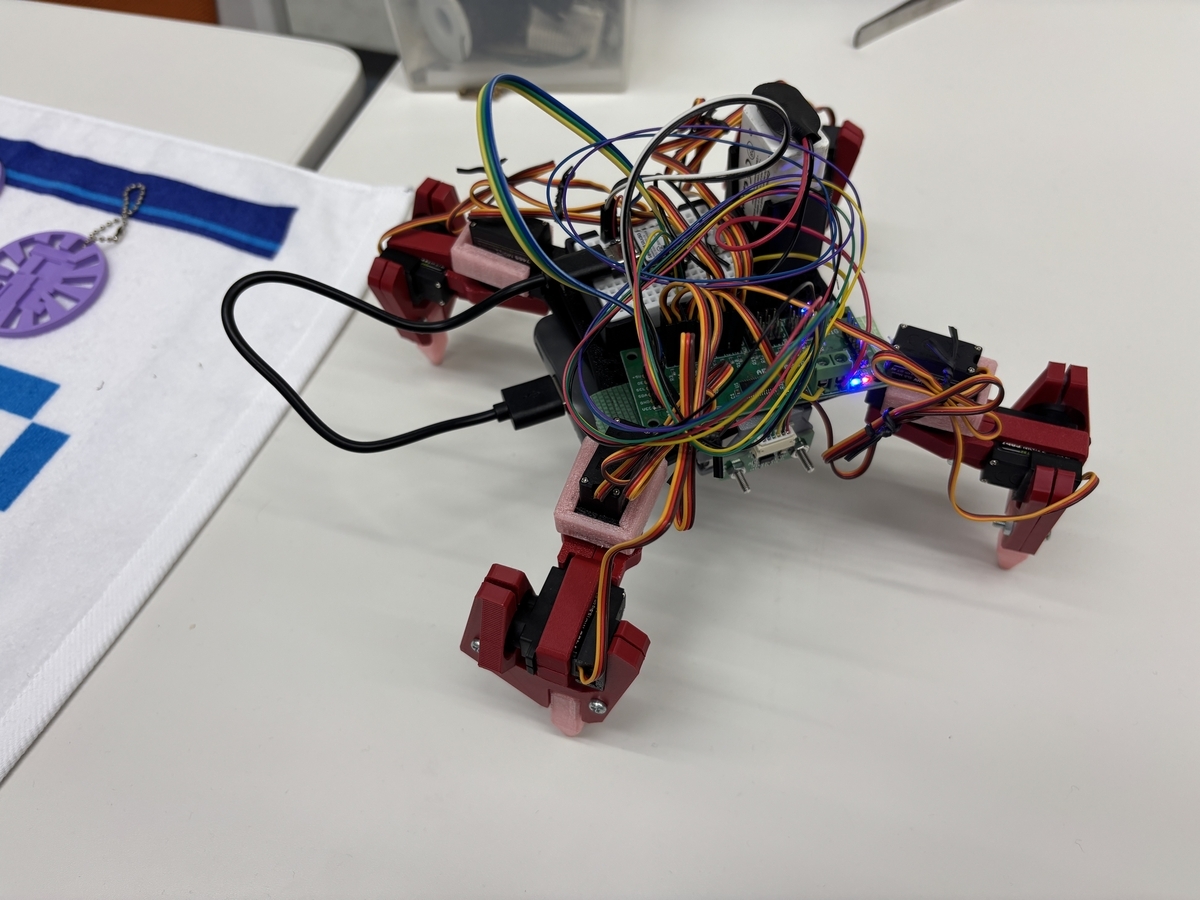 電子工作の例。四足歩行ロボット。ブログに詳細あるので、ぜひ!
電子工作の例。四足歩行ロボット。ブログに詳細あるので、ぜひ!
合格発表~入学まで
主にこんなかんじ。結構やることあって忙しいですよ。
- 結果報告
- 入学に関する手続きやら書類やら
- お部屋探し
- 銀行口座
- 新生活に向けて購入
- 奨学金とかクロバスとか
結果報告
予備校の先生とか友人とか祖母とかに報告した!皆さん割と気にしているので。ちゃんと報告しましょう。感謝も忘れずに。あと学校にも連絡しました。進学実績とか大事ですし。あと、その大学に知り合いがいるなら連絡しておいた方がいいと思います。困ったときに助けになりますし、学科が同じなら過去問をいただけるかもしれません!!(後述しますが、過去問はかなり大事です)
入学手続き
さて、入学手続きに関する書類が大量にあるのでさっさと済まします。割と多いし、期日まであんまりないので早め早めに。保険とかもあるので。あと、このあたりでミールプラン(生協のやつ。所謂ミール奴隷)にも加入する書類?を書いたかな。
場合によっては役所とか行かないとですし、役所開いてる時間も限られてるので、いずれにせよお早めに。
お部屋探し
良い物件を選びたいなら、前期の合格発表よりも前からしておくべきなんでしょうが、私は合格発表翌日に生協マイルームに行って(つまり大阪のキャンパスまで行った)決めましたね。
ただ、よくある話なのですが、途中でキャンパスが変わることがあります。例えば、B2からキャンパスが変わる場合、B2以降のキャンパスから近い場所のお部屋を選び、B1は少し遠いけど頑張るという人もいます。私の場合、早起きする自信がなかったし、引っ越しの荷物もそんな多くないだろ、ということで引っ越しを前提に、部屋を選びましたね。
選んだ部屋は、キャンパスの隣かつモノレール駅の隣(モノレール高いけどね。なぜかB1の間に別キャンパス開講の必修講義があったので公共交通機関必須だった。弊学科の悪いところすぎる。)というなかなか素晴らしい立地ですが、家賃は4万を切りました。これは不思議でもなんでもなくて、その分、部屋のサービスがゴミです。主に下水周りが。
私は比較的どこでも住める性格だったので、こういう選択をしましたが、よく考えて選ぶ方がいいと思います。B2に上がるときに、ちゃんとお部屋決めた(自認)ので、そのときのお話を書きます。
B2では2月くらいに探して、即決定、3月あたりに入居しましたね。あんまり遅いと新入生と被るので早めに動きます。以下の観点から探しました。
- 家賃:当たり前。
- 何階?:女の子だと特に気にするかも?
- 方角:西日はまぶしい。
- キャンパスとの距離:遠いと一限起きるの大変だよ
- 周りにお店ある?:自炊とかするならスーパーとか欲しい。薬局とか欲しい。自転車あるかにもよる。
- ガス・電気:契約忘れずに
- 水道代:固定費か変動費か?好みですが。
- 敷金・礼金:無い方がいいけどね。
- 風呂とトイレが別か同じか:割とここ見る人多いと思う。私は気にしないですが。
- 収納どんくらい:収納大きいと嬉しいらしい!
- 設備:エアコンとかインターネットとか
- 周辺環境:隣の店がファストフード店だと虫の影響とかね。
新生活に向けてあれこれ買う
一人暮らしなら、家電とか結構買うものあります。とりあえず思いつくものあげると以下のようになりますね。
- 冷蔵庫:自炊するなら大きい方がいいけどね。
- 洗濯機:部屋によっては共用のものがあったり、外にしか取り付けられなかったり、サイズ制限あったり
- 炊飯器:米は食べるでしょ?
- 料理器具:フライパンとか鍋とかボウルとかざるとか
- 食器:箸、スプーン、フォーク、コップ、皿
- 電気ケトル:あると便利。なくても大丈夫らしい。私はインスタントコーヒーめっちゃ飲むので。
- トースター:パンはトースターで焼くとおいしくなる
- 電子レンジ:ファミマのまぜそばとか食べたいでしょ?
- 机、椅子、スタンド:流石に床で作業は腰が痛い
- 棚とか?:収納する。
- ベッドとか布団とか:あったかくして寝てね。
- 掃除用品:掃除はしろよ!?
- 生活消耗品:トイレットペーパーとか洗剤とか歯ブラシとか洗顔とかボディソープとか
- 衣類:服は着てね。タオルとかもあるよ。あと洗濯用ハンガーとかね。
- 食料:最初なので、パスタとかレトルトとかあると安心。
- 勉強するのに必要な電子機器:パソコンとかiPadとか?後述します。
多分、忘れてるものもあるでしょうが、結構あります。基本的には先に買っておいて、万が一忘れたら現地で買う方がいいと思います。親を頼って忘れないように買いましょう。
ちなみに、私は無印とかでそろえましたね。あとは親が家具にうるさいので従いました(感謝)。
また、勉強に関する道具ですが、教科書とかは一旦置いておきます。PCについて、おそらく生協からチラシもあったと思います。所謂レッツノートが生協PCとして有名です。保険とかの都合でめちゃくちゃ高くなってますが、まぁ特段こだわりがなければそれでもいいと思います。私はゲームとか動画編集とかするので、もっといいPCを買いました(正確には高校からのを持って行った)。
チラシ関連で、電子辞書とかも売ってますが、講義で指定されているとかでない限りは買わなくても困らないです。少なくとも生協のを買う必要はないです。理系に必要な単語も調べられる!とかありますが、電子辞書でそういう言葉を調べる人なんていません。
あと、iPadとかそれに類するものは割と購入推奨です。というのも、最近は講義資料がPDFで配布されたりするので、PDFにそのまま書き込んだり、すぐに課題を提出できるiPadは重宝します。私は、学生割とか新生活キャンペーンを駆使して購入しました。なお、タッチペンは純正である必要はないとは思います。ただ、わざわざ純正以外を購入して失敗したくないので、純正を買いました。高いけどね。カバーとか画面フィルムは純正ではないものを買いました。流石に高すぎ。
 iPadではゲームもできる。グラフィック強いですね。
iPadではゲームもできる。グラフィック強いですね。
そのほか
仕送りのための銀行口座をこの時期に作りました。ハンコとか手続きに時間かかる場合もあるのでお早めに。クレカはそんな急がなくていいと思います。
奨学金については、本来はここで考えるべきでしょうが、私は気づかず、B2あたりで気づきます。最近は子供(兄弟が3人以上とかだったかな)が多いとかでもらえる給付型奨学金とかもあるので、調べてみるといいかもしれません。
また、この後で履修登録をするわけですが、その講義について、どんな先生の講義か、成績評価はどう行うか、比較的簡単に単位が取れるのかどうか(楽単かどうか)などの情報が有志の大学生によって作成された「クロバス」という冊子がキャンパスで売られてたりします。たまたま売ってたので、買いました。確かに、役立ちます。
入学してから
ご入学おめでとうございます!待ちに待ったキャンパスライフですね!!流石の私も春が来た!と思いました。思い込んでました(笑)いや、楽しいんですけどね。?
- ガイダンス的なやつ
- 履修登録
- 教科書とか購入
- サークルについて
ガイダンスについて
先生や友人(になる予定の人たち)と初めて顔を合わせることになると思います。まぁそこまで重要なことは言われない気もしますが、LINEグループとかには参加しましょう。ありがたい情報が来るかも?
あとこのあたりで、話せる人を作れたらすごいです!私は大失敗しました。
履修登録
大学は自分の時間割は自分で作ります。卒業の手引きとかにあると思いますが、卒業要件を満たせるように履修するべき講義を確認し、登録していきます。最初の方は必修が多いので、他の人とおおよそ同じになりますね。他の人と確認や相談しつつ登録できると間違いがなくていいと思います。これミスすると、最悪留年とかあるので。よく確認して登録してね!!
また、共通科目に関してはある程度講義を選べるので、友人と合わせたり、先輩、クロバスやシラバスを参考にして決定します。抽選とかもある場合がありますね(クロバスで楽単とあるものは人気がある場合が多いです。万が一抽選に外れると、外れ講義に履修する羽目になる可能性もある。よく考えましょう!)。
専門科目に関しては、クロバスとかには載ってないので先輩からの評価を聞くのがいいと思います。講義によって、成績評価(試験100%なのか、レポートもあるのか、出席は取るのか、とか)や講義の進め方など変わってくるので、そのあたりを考えつつ、登録しましょう。
教科書とか
履修する科目によっては教科書必須なものがあります。期間限定で生協とかが販売しているので購入しましょう。ただ、専門書のため高価な割に、あんま使わない場合が多々あります。先輩や知人からもらう、メルカリとかで安く手に入れることを視野に入れてもいいと思います。
また、それ以外の器具が必要になったりはします。理系だと関数電卓とかですね。私の学科は製図道具やら作業服が必要だったりします。要確認。
サークルについて
サークルとは、趣味や興味が似たような人が集まり、独自の文化を創り出すよくわからない集団および団体をいいます(適当)。部活とかクラブ活動に近いですね。サークルによってそれぞれで、ゆる~いところもある一方、かなり本格的に活動しているところもあります。そのあたりは自分に合ったものを選べばいいですし、一旦様子見してみて、良さそうだったら継続する、入部するなりすればいいです。
私の意見としては、人脈を広げる、同じ趣味の人と交流するという意味で、1つくらいはサークルに参加することを推奨します。
ではどうやって探すの?ということですが、新入生歓迎のサークルオリエンテーションみたいなやつに参加するのがいいと思います。弊大学では、多くのサークルがそれに参加し、新入生を勧誘します。チラシとかめっちゃもらえます。私は興味ないサークルは全部断ってたので印象悪い新入生だったと思います。
ほかにも、学祭とかありますが、少し遅い時期になるので、新入生の多いこの時期に探すことを推奨します。あとはTwitter(新X)とかかな、、、
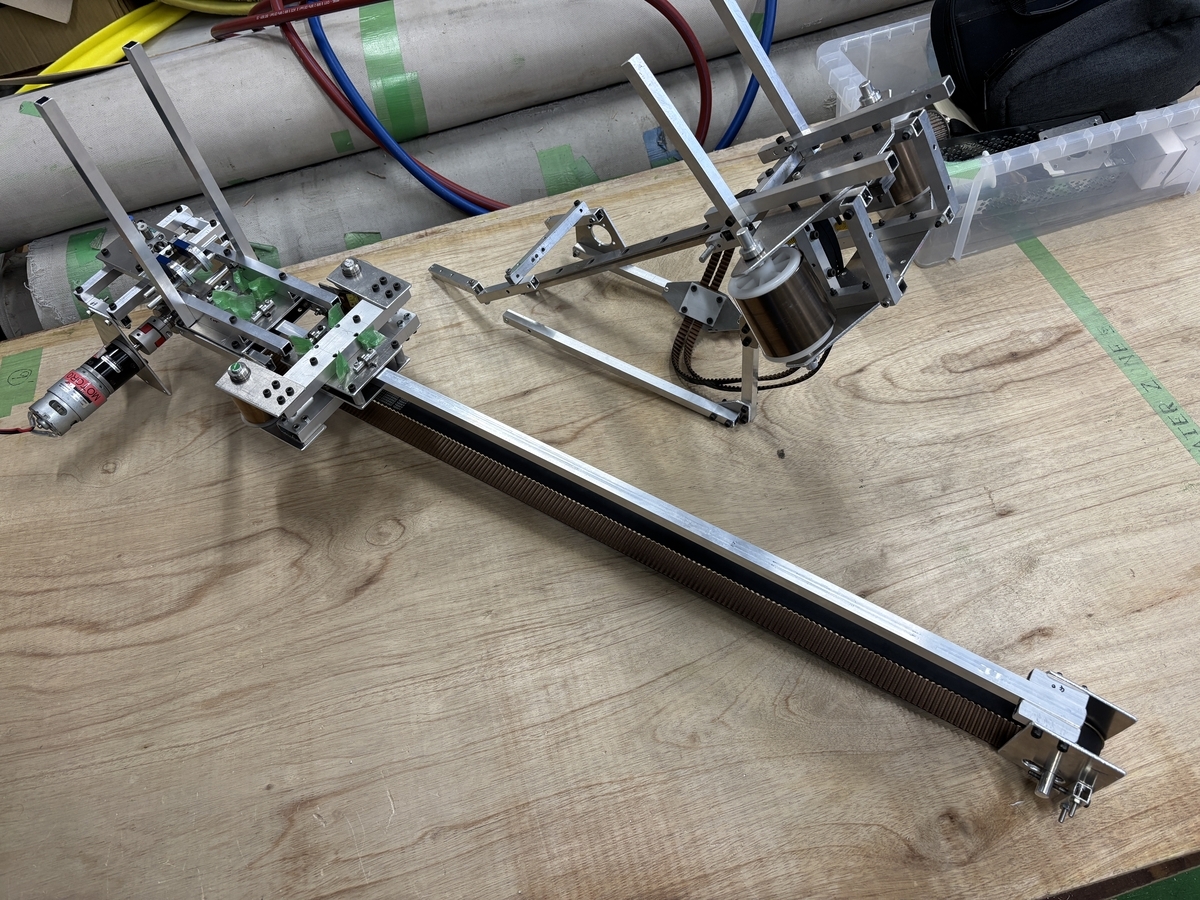 サークルで作った、ばね直動射出機構
サークルで作った、ばね直動射出機構
基本的な生活
さて、大学生活についてつらつらと書いていきます。
勉強について
最初は高校の延長感がありますが、次第に専門的になっていきます。楽しいですが難しくなります。教科書や先生、友人を頼って勉強しましょう。ここでの内容が将来的に役立つとは聞く。よく言われるのが、「将来的に、あ、こういうこと学部生のときに学んだなぁ、と思い返し、教科書みて、あぁそういえばこういうことだった。」程度に学んでおきたいらしい。
ただ、高校と違うのが、「単位」という概念が付きまとうことです。単位を落とすと、来年もう一回取りに行かなければならない(再履修)ことになりますし、最悪の場合、卒業要件を満たせず留年ということになります。多くの大学生は単位を取るために勉強しています。まぁ、この単位、大学によって取りやすい取りにくいが多少はあるらしいですね。弊大学では「大阪湾に沈んでいる」などと揶揄されますが、、、しっかり勉強すればとれるとは思います。多分。。。
そして、大学では去年の講義も同じ先生が担当の場合がほとんどです。つまり「過去問」がかなり有効なわけです。過去問を頼りに対策を練り、勉強し、単位をとるのです。過去問をくれる友人や先輩は大切にしましょう。また、未来の後輩のために、そういった資料は保存・保管しておきましょう。
成績について
卒業自体には単位が必要ですが、研究室配属や推薦入試では評定が重要になってきます。ここで、大学ではGPA制度を導入している場合が多いです。各講義の成績に基づいて評定が定まり、その評定の重みを与えて(GP)それの平均によって評価するものです。詳細は省略しますが、これが良いと、のちのち良いことがあったりします。また別の機会にブログに書こうとは思いますがね。ただ、大学によって結構異なるので、よく把握する必要があります。
要するに、単位とるだけじゃなくて、ある程度いい成績をとることにも意味があるということです。
忙しいの?どうなの?
学校の忙しさですが、これは大学や学科によって大きく異なります。私の場合、つまり工学部の某機械系学科ですが、おそらく忙しい部類になると思います。特に実験やレポート、演習などが重いですね。また必修が多かったり、他の学科との都合で1限が多かったりと工学部の中でも忙しい学科でした。でも、自分のやりたかったことしかないですからね。楽しいですね。世界が広がり、知識が深まるかんじが楽しいですわ。
逆に、某経済学部やら文系学部、工学部だけど割と楽な学科に対してはヘイトが溜まるわけですね(笑)。まぁ大げさに言ってますが、本当にそれぞれです。
ただ、高校と比べると確実に自由に使える時間は多いわけです。その時間をレポートなどの課題の質を高めるために使うのか、バイトか、サークルか、趣味かというだけの話です。これほど自由な時間を与えられるのは大学生の特権だと思うので、有意義に使うべきです。私はサークル(ロボコン)にかなり重点を置いた生活をしていましたね。そのため、成績が悪くなり、今研究室配属で若干苦しんでいます。。。。(正確には推薦入試の枠の獲得に苦しんでいる)
バイトについて
前述しましたが、B3までバイトしてませんでした。これは少数派で、多くの人はバイトをします。飲食店や塾関係(塾は割と大変らしい)、家庭教師、技術系バイトなどなど、、、、。人生経験になると思うのでいいと思います。
私は、B3になってから研究室バイト(今はやめた)とスタートアップ企業で技術系バイト(今)をしています。ちょっと特殊なケースなので、一般的なバイトについてはあんまり詳しくなくてごめんなさい。。
食生活について
昼はミールプランに加入(生協のサービス。加入プランに応じた金額分が毎日支給され、それを使って食堂のメニューを頼む。余った金額が翌日繰り越しとかは無いので、毎日消費しないと損する。そのため、ミールプランに加入した人はミール奴隷としての生活を強いられる)していたため、生協の食堂で済ませてました。
朝と夜は自炊。母の偉大さがよくわかりますね。
節約しようとすれば、パスタや質素な選択をすることで可能ですが、私は我慢できないので食べたいもの買ってしまうタイプです。お菓子もめっちゃ食べるし。でもポテチは多く感じますね。実家だと家族で分けていたので。食べきれない。。
 とはいえ、大学生といえばラーメン。深夜の一蘭は満足感がすごい。
とはいえ、大学生といえばラーメン。深夜の一蘭は満足感がすごい。
恋愛について
さぁ、大学生です!彼氏・彼女ができてくるわけです!君にも春が訪れるかな?????
私には来ない、正確に言うと、工学部など男子ばかりの環境では、なにか行動を起こさないとできません。まぁ当たり前ですが、そもそも女子の人数が少ないですからね(逆に、女子は選び放題だからみんな彼氏とかおるんかな。知らんけど(笑)(自虐))。
私は今のところ縁が無いので、周りの友人のことを言いますが、マッチングアプリが多いですね。あとはサークルとか、SNSでたまたまとか?ちょっと知らない世界なので、このあたりで終わりにします。あと、何気に私の心に刺さる。痛い。(´;ω;`)
 俺には、推しがいるから!!大丈夫だもん!!!うわぁーーん!!(世紀末
俺には、推しがいるから!!大丈夫だもん!!!うわぁーーん!!(世紀末
一日の生活例
例として、平均的な私の一日をどうぞ。手書きでごめんね。
 理系大学生の一日の例
理系大学生の一日の例
まぁこれはかなり理想化されたようなもので、実際はサークルの時間が伸びたり、課題の時間が無くなったり、趣味の時間が増えたり、睡眠時間がなくなったりします。参考程度にどうぞ。
おわりに
さて、かなり長く書きましたが、理系大学生ってこんなかんじです。誰かの参考になれば幸いです。何かあればコメントしてください。大したことは言えませんがね!!
それでは良きキャンパスライフを!!(そういえば、自分の大学生活をキャンパスライフって表現することは今までなかったな、、、)